
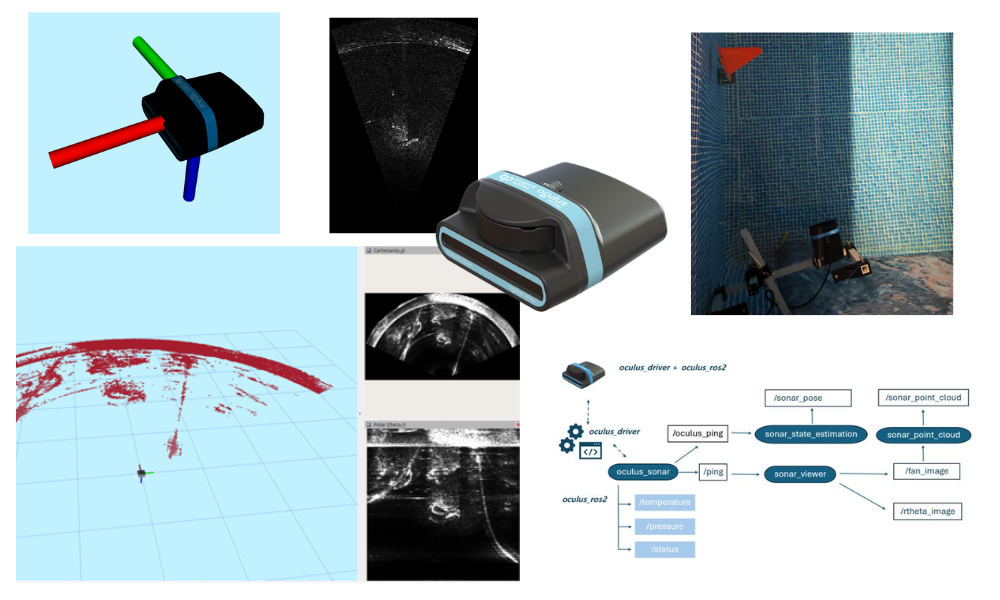
ROS2 Driver for Blueprint Oculus M3000d Imaging Sonar
 PhD Research Project - Ongoing
PhD Research Project - Ongoing
Hardware Interface Project - 2025
C++ - ROS2 - Sensor Driver
Developed a ROS2 C++ driver for the recent blueprint oculus M3000d imaging sonar (from official M3000d sdk and M1200d ENSTA driver). Integrated additional acoustic processing on raw sonar data. Implemented accurate representation conversion (polar to cartesian) and point cloud broadcasting. Tested sonar internal AHRS and pressure sensors. Other features are under development-testing based on our needs.
 Personal Project - Ongonig
Personal Project - Ongonig  SRL Sequel - Completed
SRL Sequel - Completed  Research Project at SRL - Completed
Research Project at SRL - Completed  University Project + Extra Course -Completed
University Project + Extra Course -Completed  University Project-Completed
University Project-Completed  University Project-Completed
University Project-Completed  University Project-Completed
University Project-Completed 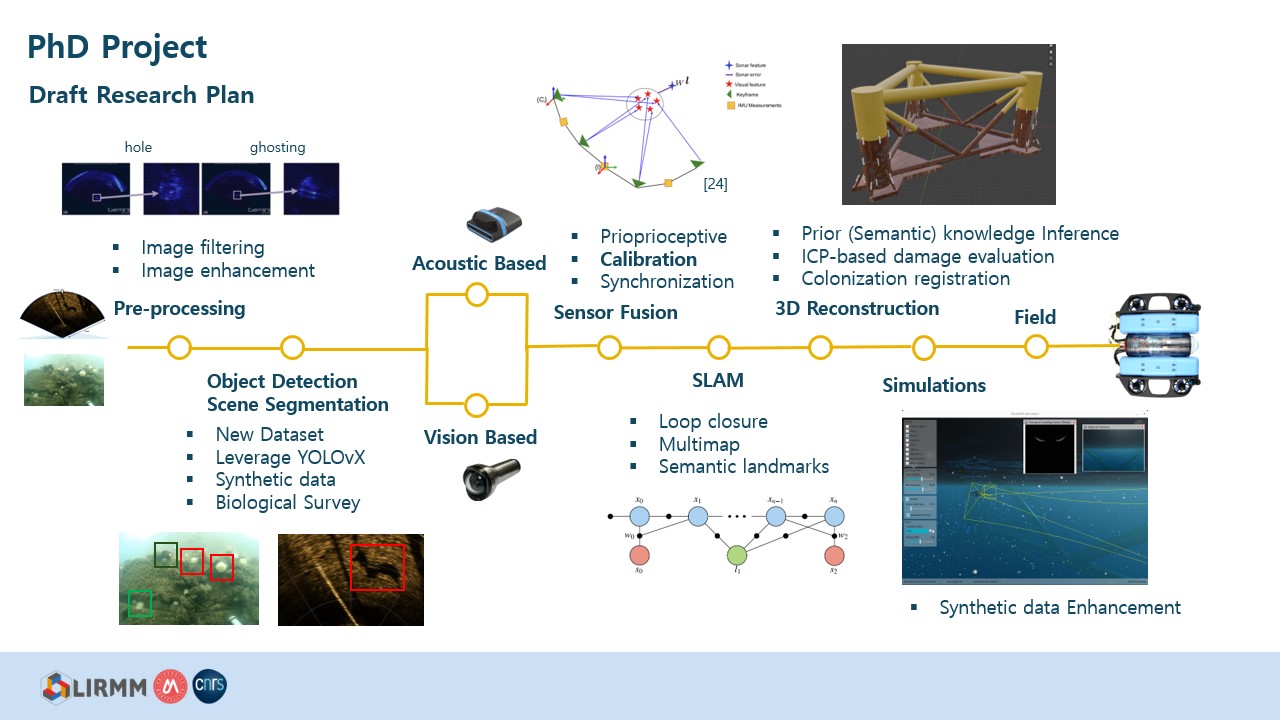 PhD Topic Presentation - 14/01/2026
PhD Topic Presentation - 14/01/2026  PhD Review - 20/01/2026
PhD Review - 20/01/2026