
ROS2 Driver for Blueprint Oculus M3000d Imaging Sonar
Ongoing - 2026 | C++ - ROS 2 - Imaging Sonar - Sensor Driver - Underwater Acoustics
This project is adapted and extended from the M1200d ROS2 Driver by ENSTA Bretagne Robotics, and the underlying low level Driver Sonar Interface. The rebase to the M3000d model has been possible thanks to the ViewPointv2 SDK that the Blueprint Subsea Customer Support Team shared with me.

During the development of the driver, the following tasks have been addressed:
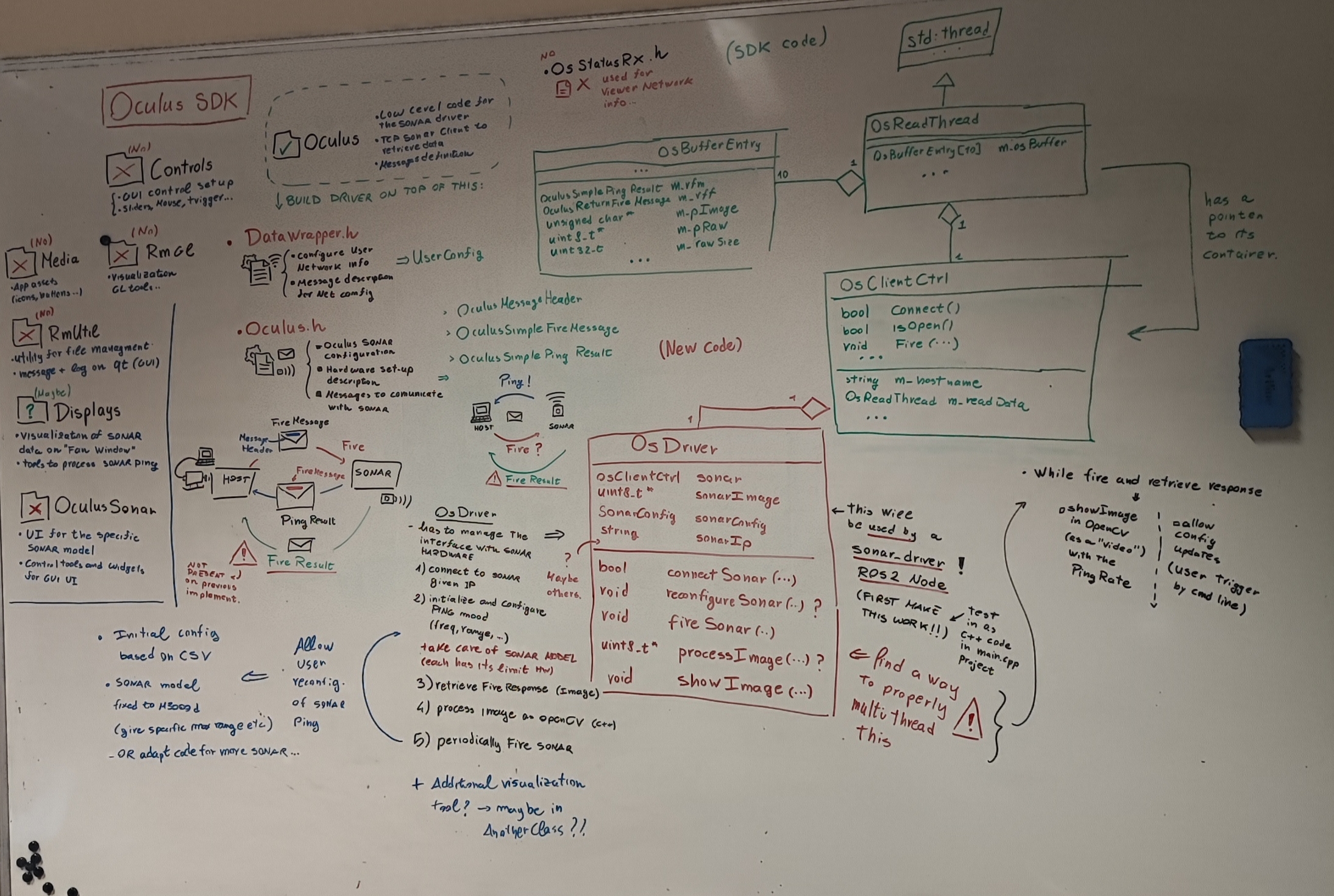
- Investigated the working principles of acoustic sensing, related software interface, and used data structures.
- Updated the ROS2 driver of the previous sonar model, based on the proprietary C++ SDK.
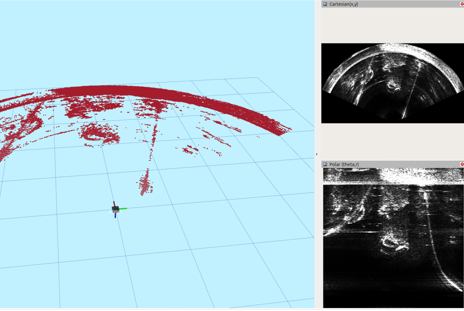
- Integrated acoustic data pre‑processing and explored possible state estimation approaches