
Software Development, Simulation, Control, and Hardware Experiments on a Multi-Modal Quadruped Robot
Completed - 2024 | C++ - ROS 2 - Gazebo Simulation - Limbed-robot - Hardware Testing
This project was completed as a member of the Rover team, one of the many teams of the Space Robotics Lab, led by Yoshida Kazuya sensei.
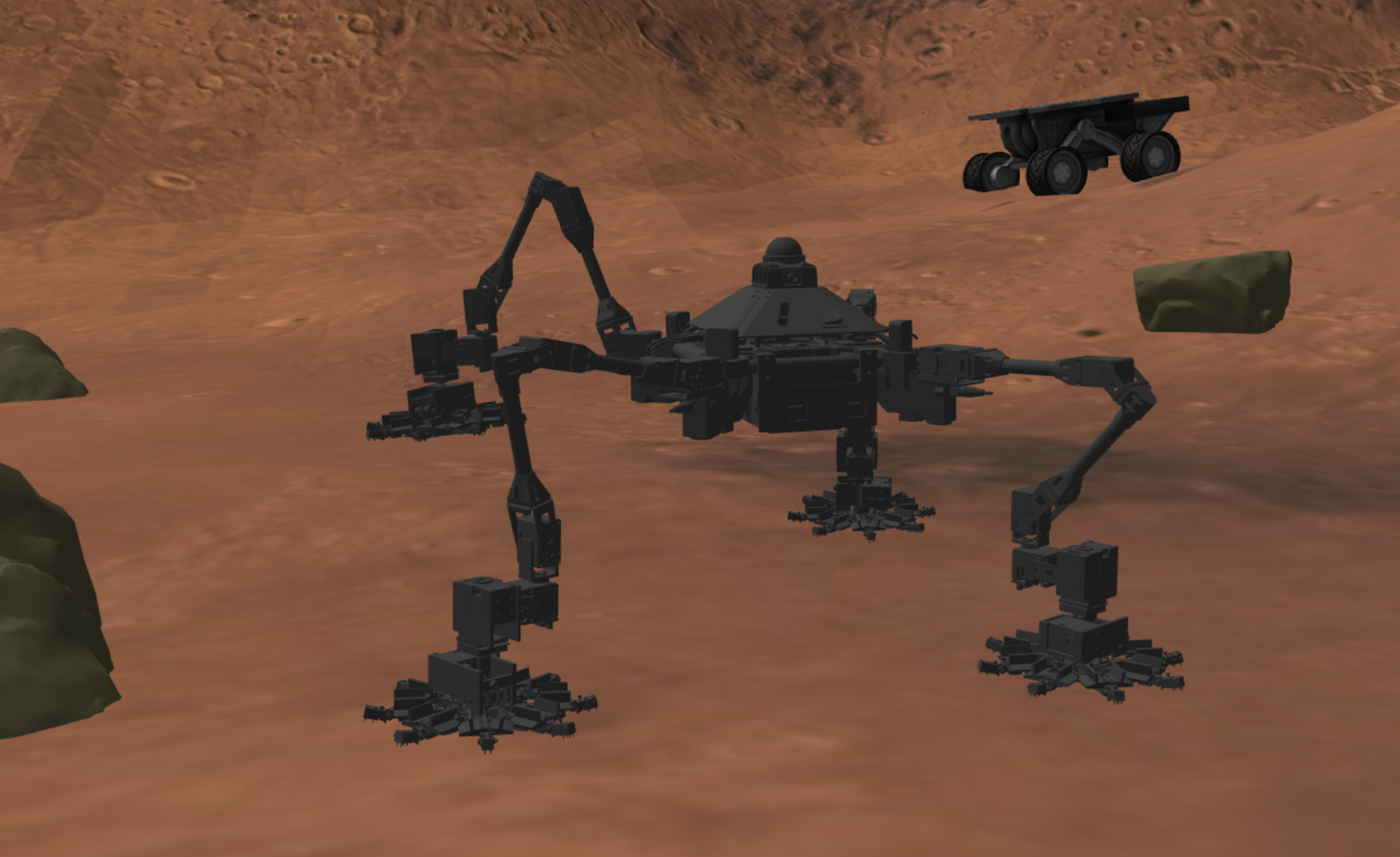
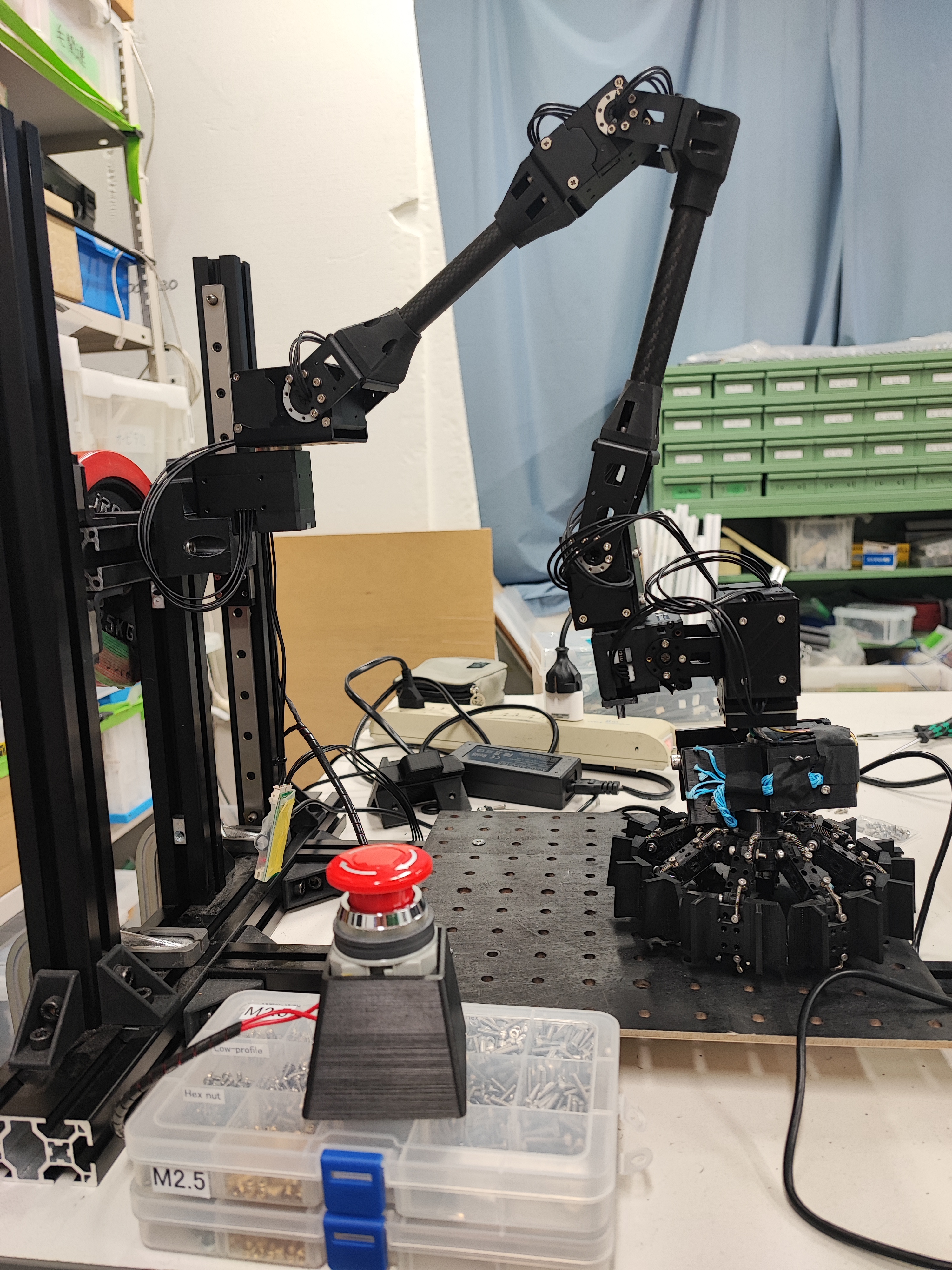
The starting point was a ROS 2 software development of many packages controlling a climbing quadruped robot with 4 DOF per limb, and a gripper as an end-effector. What is the mind-blowing part? The new end-effector I worked with, both in simulation and in real life, was a transformable module, able to transition from gripper to wheel and vice versa, by pulling some wires. Making the robot able to walk, climb, and even drive!
Summary: Conducted 500+ hours of research in Tohoku University’s largest robotics lab, which comprises 80+ members across 5+ teams, under the supervision of Yoshida Kazuya Sensei.
- Researched methods for robustly and efficiently transforming a prototype multi‐modal limbed climbing robot, equipped with a transformable Gripper‐Wheel module.
- Integrated the new module in high/low‐level control software, with a ROS2 architecture written in C++ and Python, enabling efficient actuation of new joints in both modes.
- Improved Gazebo simulation reliability and ros2_control controller performance by fine‐tuning dynamical parame‐ ters and PID gains, obtaining a realistic simulation for algorithm testing, using Python to analyze performances.
- Tested the updated software and transition algorithm on the physical system, achieving system stability and elimi‐ nating steady‐state error in motor control.
Objectives:
- Update the ROS 2 software.
- Find a robust and stable way to transition between possible locomotions.
- Set up a reliable simulation in Gazebo.
- Tune the joint trajectory controllers, using ros2_control framework.
- Perform experiments on the real system.
Main Contributions:
- updated the ROS 2 code, now able to:
- Manage the additional end-effector joints (3 more).
- Start the transition procedure in a stable way, changing joints angle and pulling the wires.
- Drive the wheels.
- start a high-level algorithm that, using the classical legged robot stability criterion, transforms one by one all end-effectors, keeping stability.
- connect to the new Dynamixel motors, and set the internal PID gains to mine (overriding default values), and control the motors.
- Fully Physically realistic simulation in Gazebo.
- Stable joint controller, with almost perfect tracking.
- Ability to maintain the limb raised, even with a so heavy end-effector. Previously, the team had problems in transition because of incomplete PID tuning, my contribution was very appreciated and improved significantly the performance.
- Testing on the real hardware and achieving the desired stability.
Exhange Research Presentation
Research Summary
Research Report