
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Joining AILERONS
Published:
 Protecting Sharks and Rays in the Mediterranean
Protecting Sharks and Rays in the Mediterranean
Arrived in Montpellier I decided to join the AILERONS association to partecipate in their mission to study and protect sharks and rays in the Mediterranean. My limited French speeking is sometimes a limitation, but I hope that in the future I will partecipate more in the association initiatives.
Attending the WildDrone Summer School
Published:
 An Incredible Multidisciplinary Experience
An Incredible Multidisciplinary Experience
My feedback of the WildDrone Summer School experience at the university of Konstanz, Germany (22-26 September 2025). An event organized by the Max Planck Institute of Animal Behavior (MPI-AB) and the WildDrone project.
My Missed Artistic Career
Published:
 Take a Look at Some of my Drawings
Take a Look at Some of my Drawings
A random collection of some of the drawings I’ve realized throughout my journey as a self-taught artist.
projects
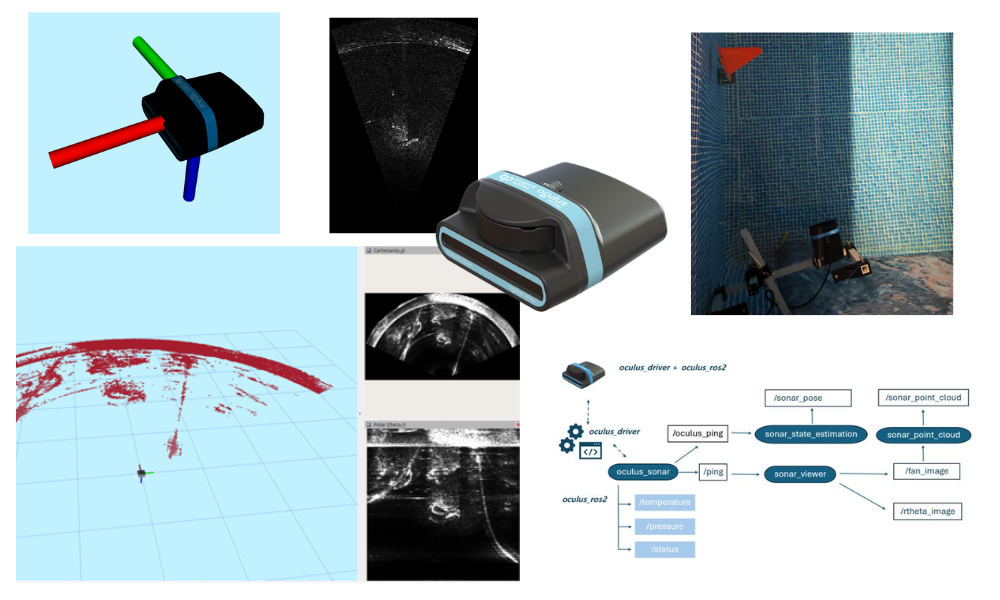
ROS2 Driver for Blueprint Oculus M3000d Imaging Sonar
 PhD Research Project - Ongoing
PhD Research Project - Ongoing
Hardware Interface Project - 2025
C++ - ROS2 - Sensor Driver
Developed a ROS2 C++ driver for the recent blueprint oculus M3000d imaging sonar (from official M3000d sdk and M1200d ENSTA driver). Integrated additional acoustic processing on raw sonar data. Implemented accurate representation conversion (polar to cartesian) and point cloud broadcasting. Tested sonar internal AHRS and pressure sensors. Other features are under development-testing based on our needs.
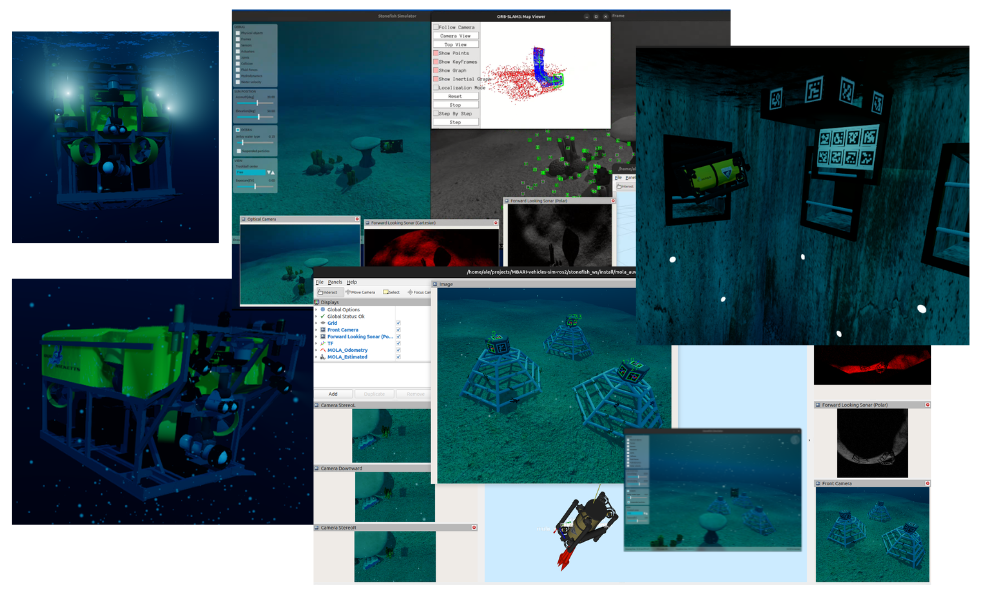
Simulation of MBARI’s Underwater Vehicles
 Personal Project - Ongonig
Personal Project - Ongonig
Underwater Simulation Project - 2026
C++ - Python - ROS2 - Gazebo - Stonefish
Modeled ROV Doc Ricketts + robotic arm (sketchfab) in ROS2 + Gazebo(2025). Migrated Ricketts simulation to Stonefish simulator (2026). Modeled the MOLA AUV (blender) consistent with MBARI’s vehicle specification. Integrated reconfigurable lights, proprioceptive (IMU, pressure) and exteroiceptive (DVL, camera, sonar) sensors. Configured the simulation for ROS2 and implemented teleoperation. Modeled custom underwater worlds. Tested perception and state estimation algorithms.
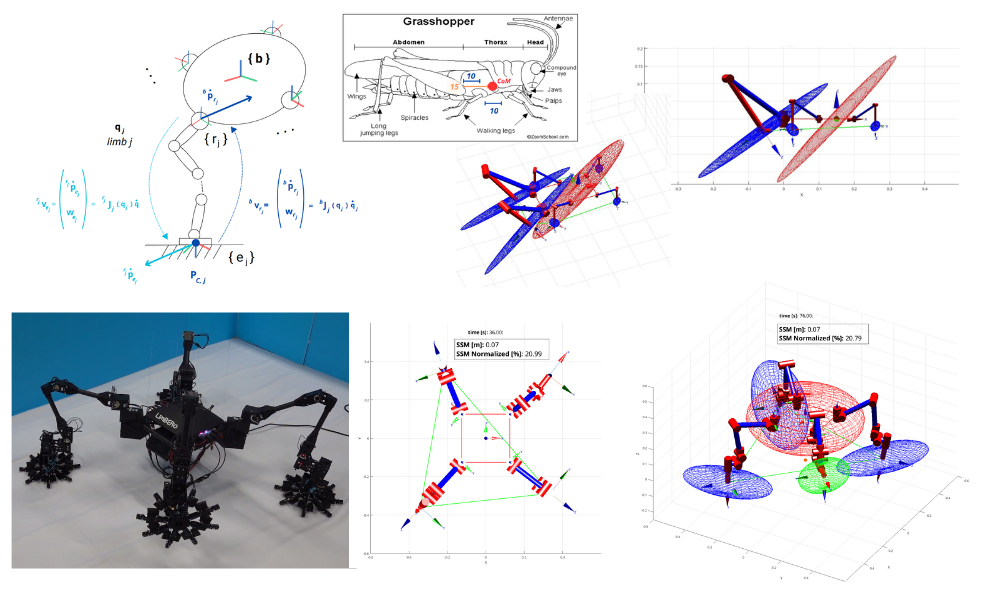
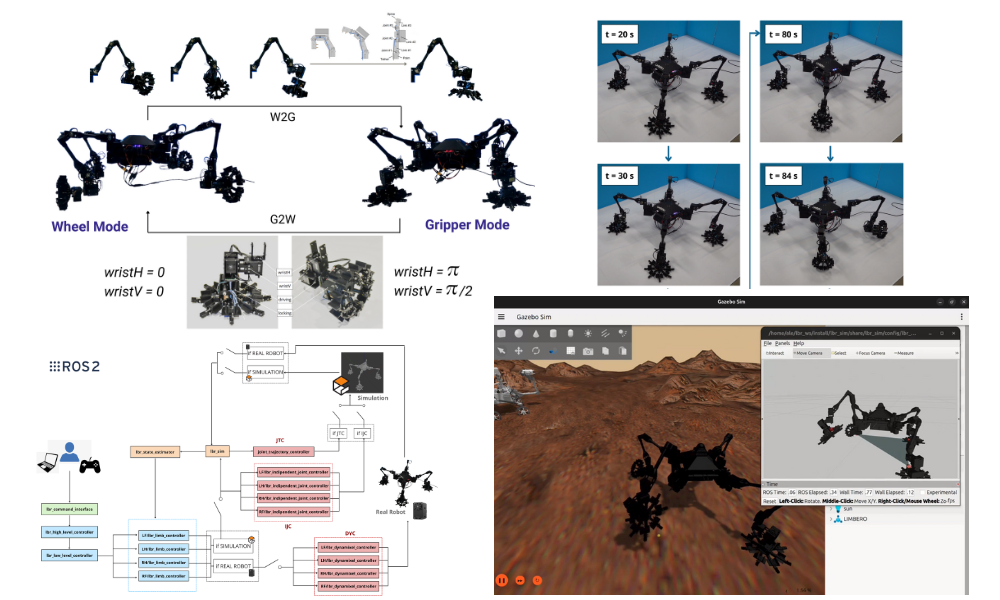
Motion Control and Manipulability Analysis of LIMBERO-GRIEEL: a Multimodal Limbed Robot for Unstructured Environments
 SRL Sequel - Completed
SRL Sequel - Completed
Master Thesis - 2025
C++ - MATLAB - ROS2 - Gazebo
Proposed and Implemented a novel index of dexterity for multi-limbed systems in MATLAB (robotics-toolbox). Validated the index on a bioinspired example. Optimized and tested the previously proposed motion sequence with the novel index. Upgraded the Gazebo simulation, and integrated the complete transformable gripper-wheel module. Implemented and tuned custom joint controllers in C++.
Software Development, Simulation, Control, and Hardware Experiments on a Multi-Modal Quadruped Robot
 Research Project at SRL - Completed
Research Project at SRL - Completed
Research at the Space Robotics Lab - 2024
C++ - ROS2 - Gazebo
Implemented and tested novel motion algorithms on a prototype multi-locomotion limbed robot. Updated the ROS2 joint control software for the new-end effector module. Updated the Gazebo simulation with the new robot components, and fine tuned its dynamic parameters. Proposed a new stable locomotion-mode transition algorihtm. Fine tuned the servo motors controllers and tested the algorithms on the real system.
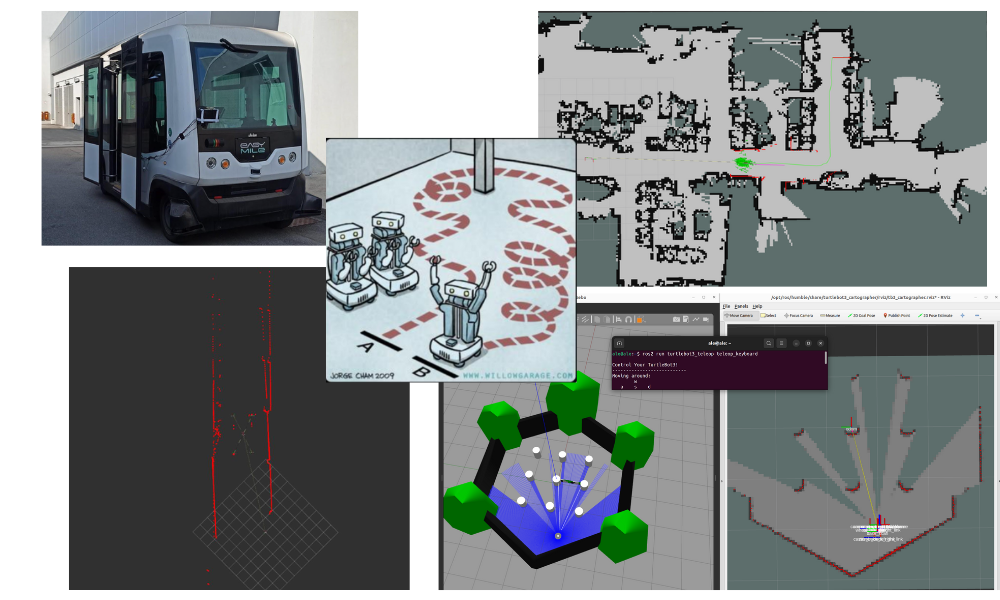
Perception Localization and Mapping for Mobile Robot
 University Project + Extra Course -Completed
University Project + Extra Course -Completed
Robotics Perception Final Assignment - 2023
C++ - ROS1 - ROS2 - SLAM
Implemented C++ ROS1 code to estimate the odometry of an autonomous shuttle from wheels encoders, based on real recorded data. Mapped the laboratory using recorded LIDAR + odometry data, using gmapping. Imported the map in a stage simulator and performed autonomous watpoint navigation. Studied and tested from external udemy course the Navigation Stack for ROS2.
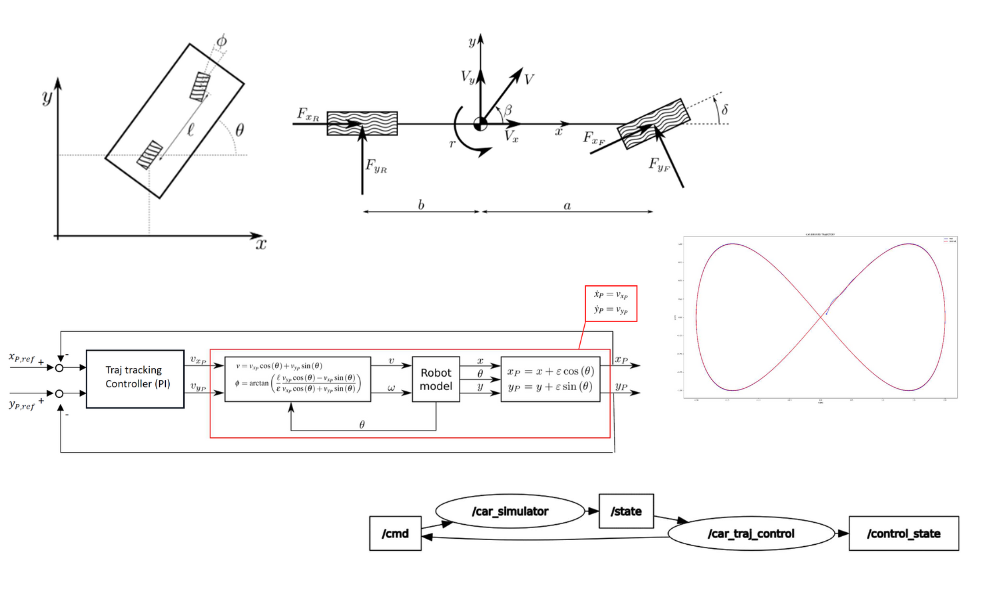
Trajectory Tracking Control of a Car-Like Robot
 University Project-Completed
University Project-Completed
Control of Mobile Robot Final Assignment - 2023
C++ - ROS1 - Simulation
Simulated a car-like (ackerman) robot with the simplified bicycle model, using ROS1 and a custom C++ numerical simulation (with odeint). Analyzed the simulation with a simple kinematic or a complete dynamic model, designed and tuned a feedback linearization with PI jectory tracking controller. Implemented the trajectory generator and the controller in C++.
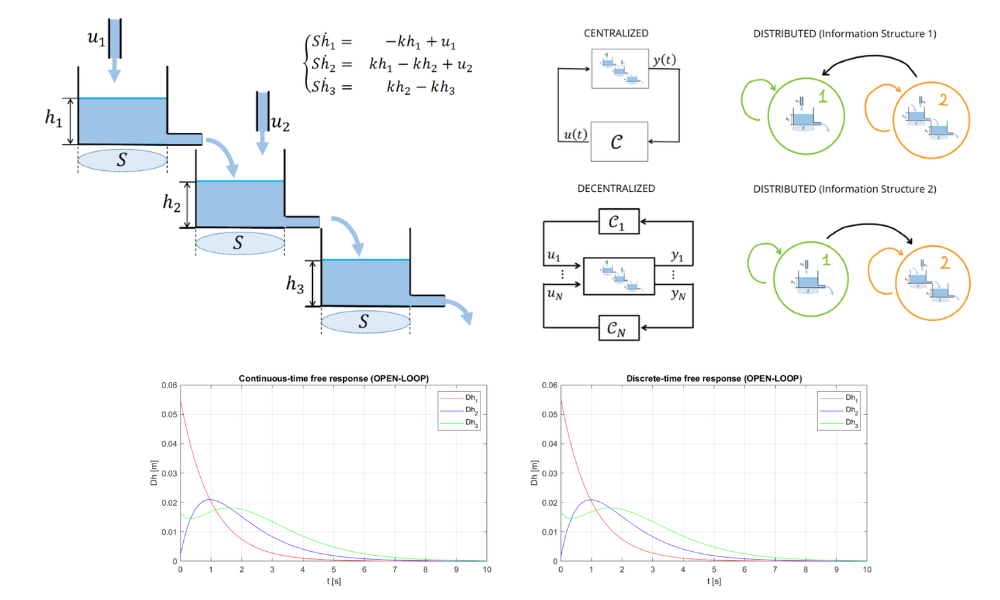
Centralized, Decentralized and Distributed Control of a Three-Tanks System
 University Project-Completed
University Project-Completed
Networked Control Final Assignment - 2023
MATLAB - YALMIP - Simulation
Modeled a benchmark control problem of a three tanks system in MATLAB, and analyzed its stability in continuous and discrete time. Tuned different control structures (centralized, decentralized, discontinuous) through Linear Matrix Inequality (LMI) theory and YALMIP optimization toolbox.
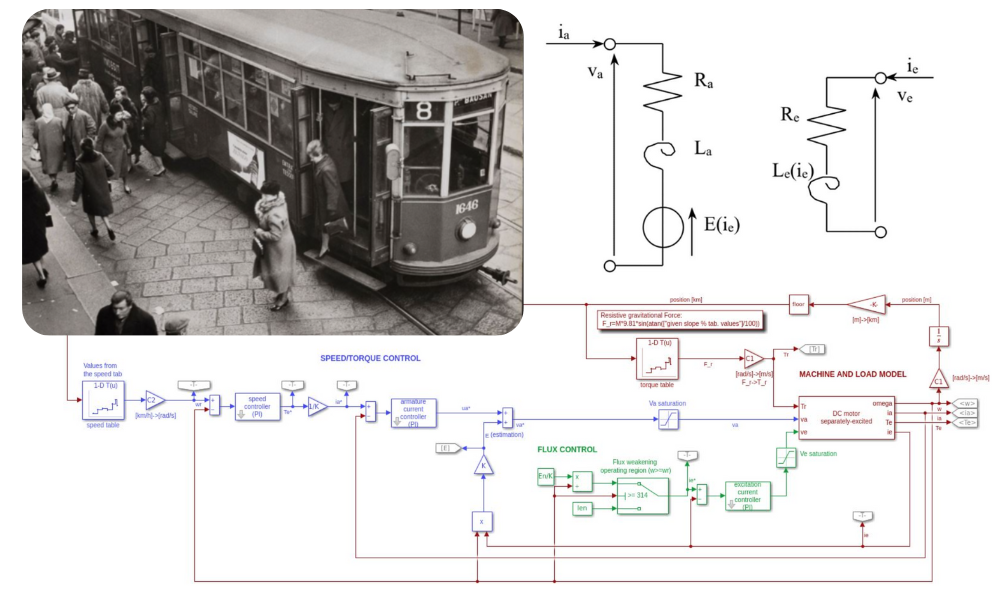
Model and Simulation of Speed Controller for trailway DC Motor
 University Project-Completed
University Project-Completed
Dynamics of Electrical Machine and Drives Final Assignment - 2022
MATLAB - Simulink - PID Control
Modeled and simulated the ‘Carrelli 1928’ tram of Milan with MATLAB-Simulink, focusing on its DC (separately excited) motor dynamics. Designed and tuned a suitable speed controller, given the track specifications. Analyzed the performance with different external disturbances (slopes).
publications
talks
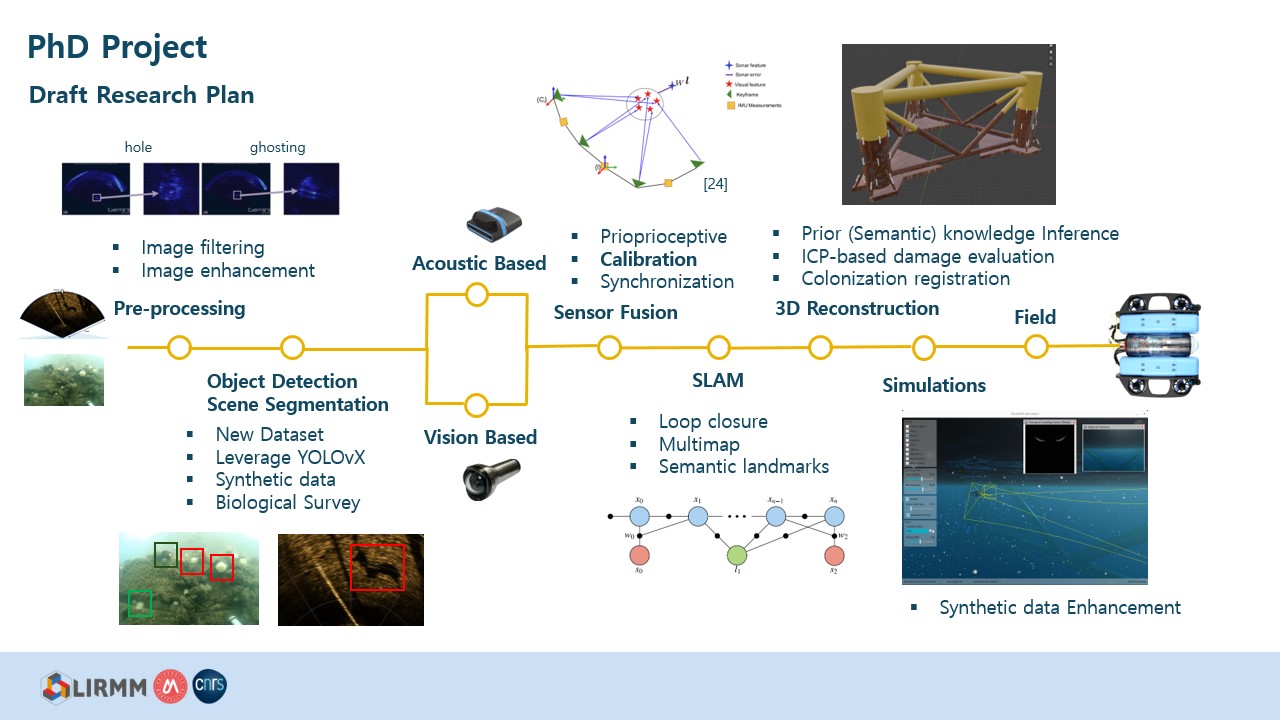
About my PhD Research
 PhD Topic Presentation - 14/01/2026
PhD Topic Presentation - 14/01/2026
Presentation of my PhD topic during the Doctorant day at LIRMM. During this presentatin I introduced myself and my main research topics, focusing on the importance of it, the addressed problem, and some used technologies.
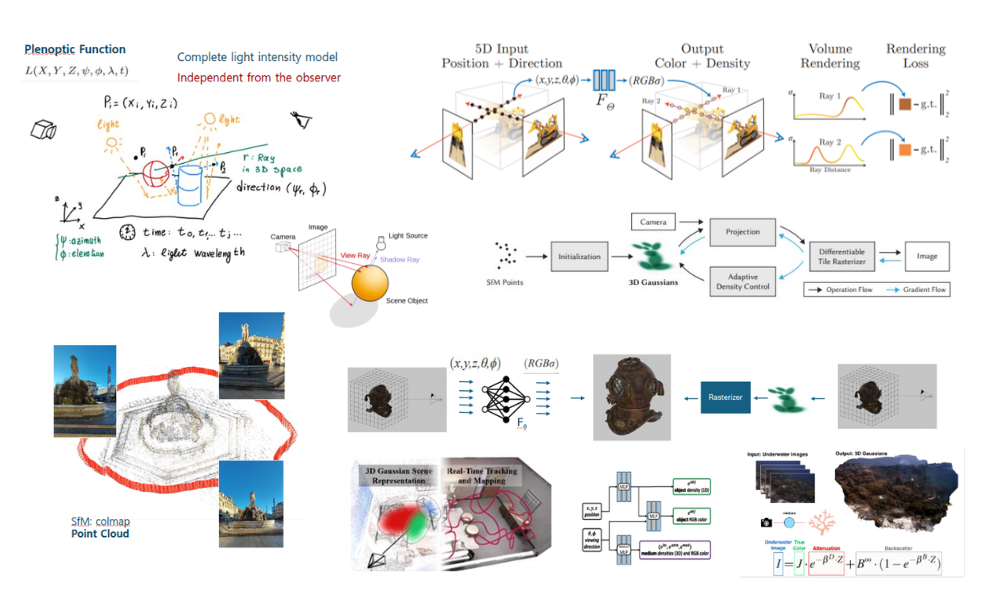
Radiance Fields Techniques - Review
 PhD Review - 20/01/2026
PhD Review - 20/01/2026
This presentation was a gentle introduction to radiance fields techniques for 3D reconstruction. Firstly answering the basics of these algorithms: what is a radiance field, what is rendering, How to represent a 3D space, what metrics are used. Secondly, presenting the vanilla implementations of NeRF and 3DGS, and finally analyzing some extensions to improve reconstruction speed or broaden application domains (such as SLAM and underwater environments).
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.