
Simulation of MBARI’s Underwater Vehicles
Ongoing - 2026 | C++ - python - ROS 2 - Blender - Stonefish Simulation - SLAM - Computer Vision
This personal project is inspired by the work of the Monterey Bay Aquarium Research Institute (MBARI), which sparked my interest in marine robotics and continues to motivate my research journey.

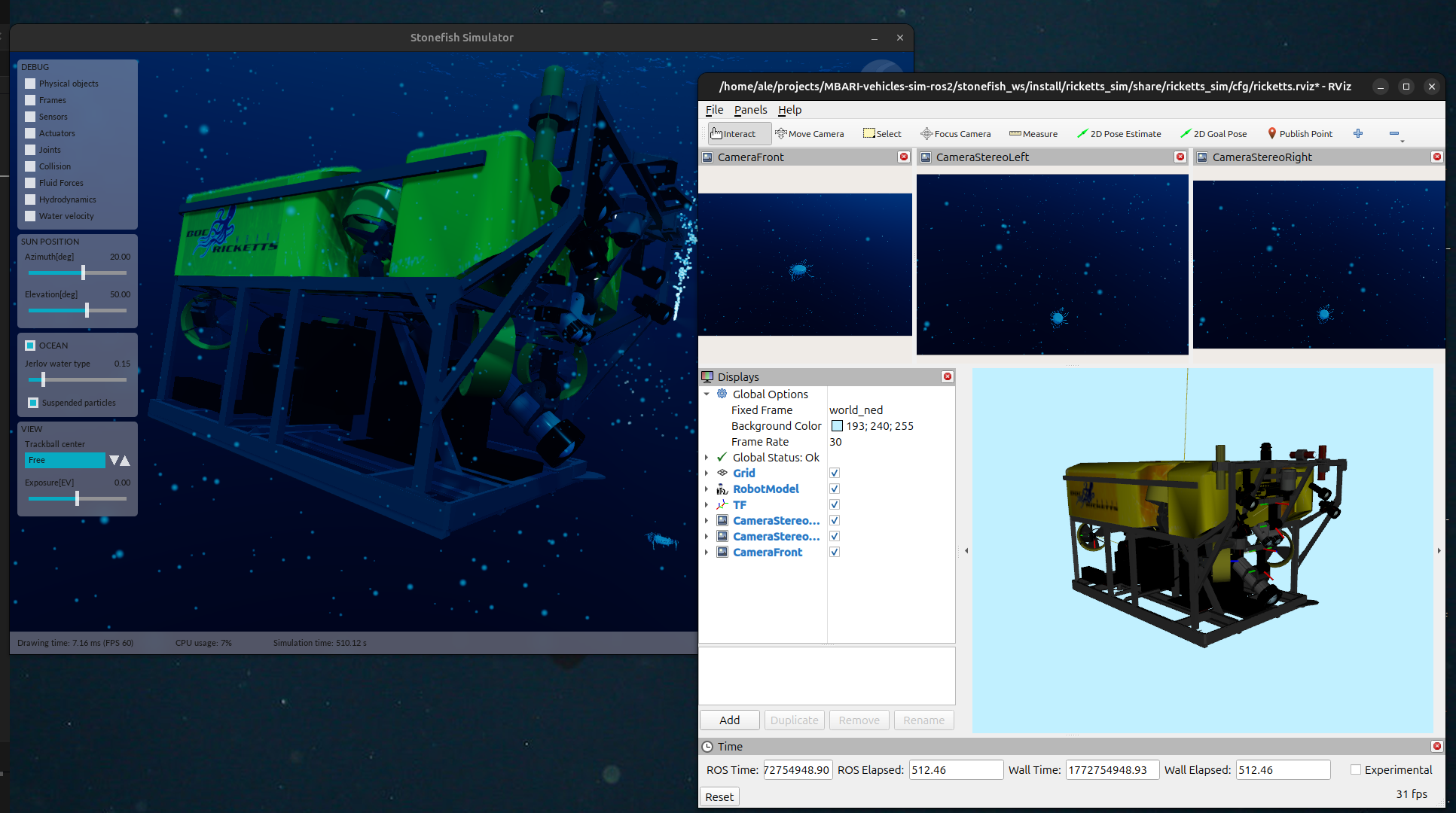
As part of my PhD at the RSM Team - LIRMM, I needed a realistic underwater simulation environment to prototype and test perception algorithms. I chose the Stonefish simulator for its lightweight architecture and physically realistic underwater rendering. To explore its capabilities and integration within the ROS2 ecosystem, I began developing a simulation environment for two of my favorite MBARI vehicles: the MOLA AUV (developed by the CoMPAS Lab) and the ROV Doc Ricketts.
The project includes several development steps, from modeling the vehicles in Blender to configuring actuators and implementing teleoperation nodes in ROS2. More recently, I have started experimenting with high-level perception and mapping pipelines, including:
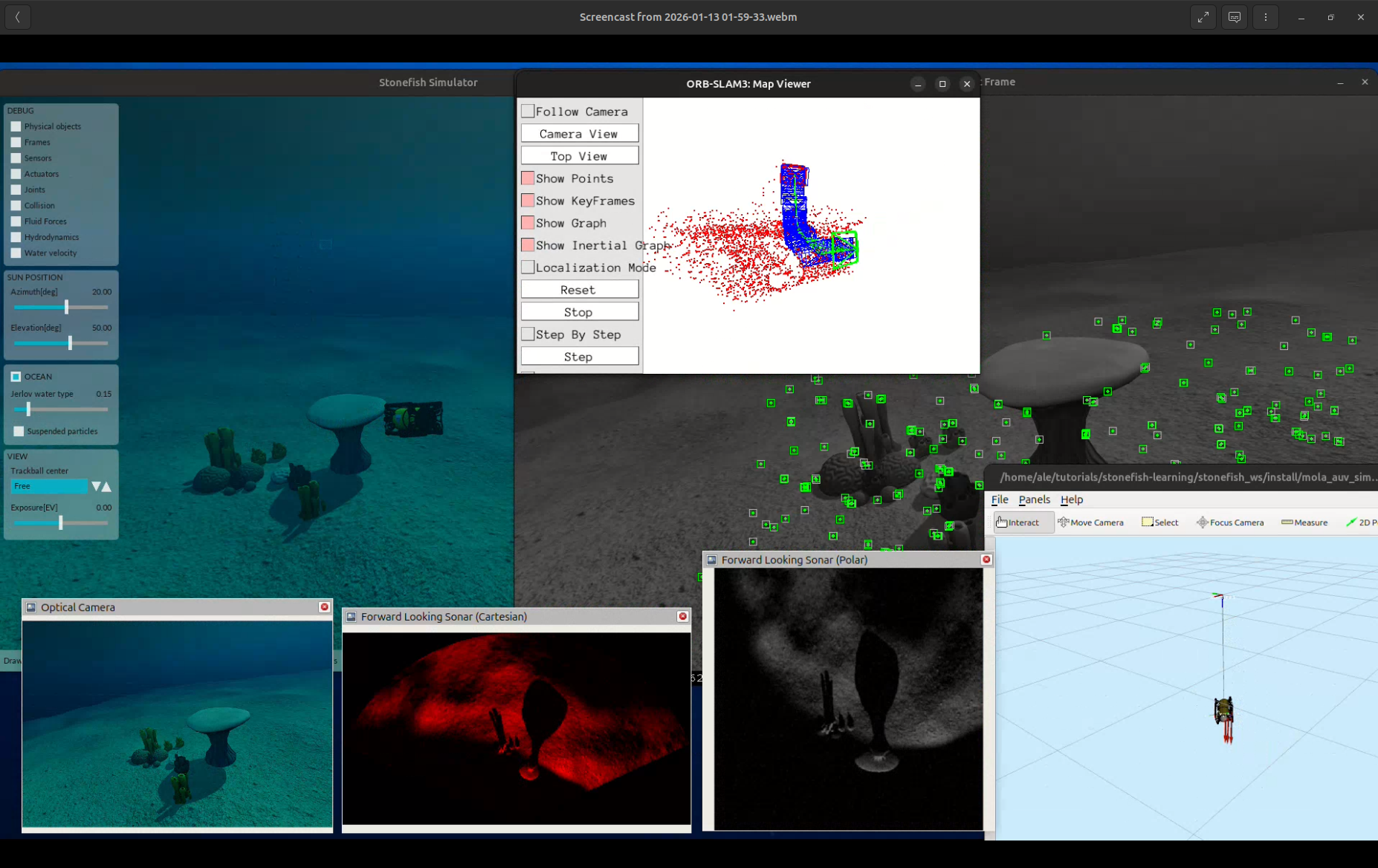
- Visual SLAM using ORB-SLAM3
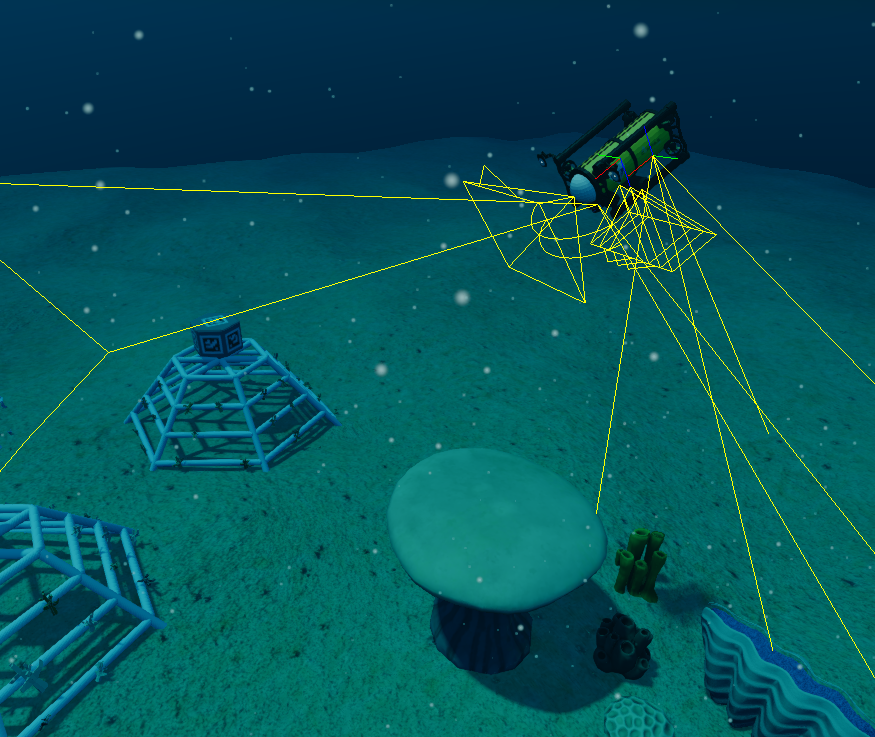
- Fiducial AprilTag markers detection
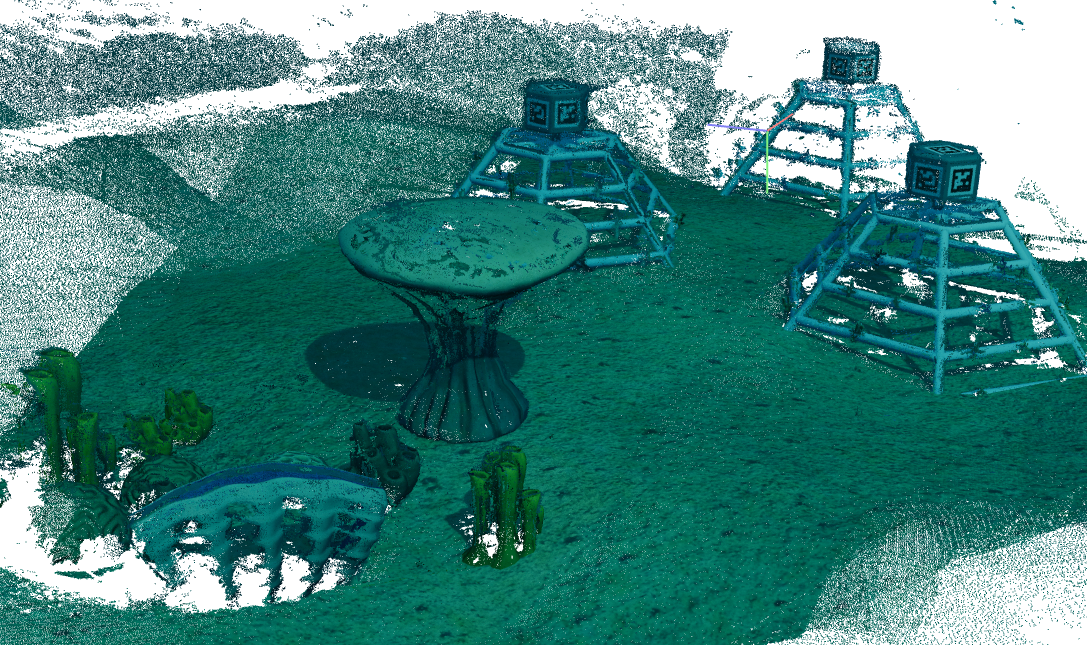
- 3D reconstruction using COLMAP and gsplat
The main accomplishments up to now are the following:
- Migrated a previous personal underwater robotics simulation project from Gazebo to Stonefish.
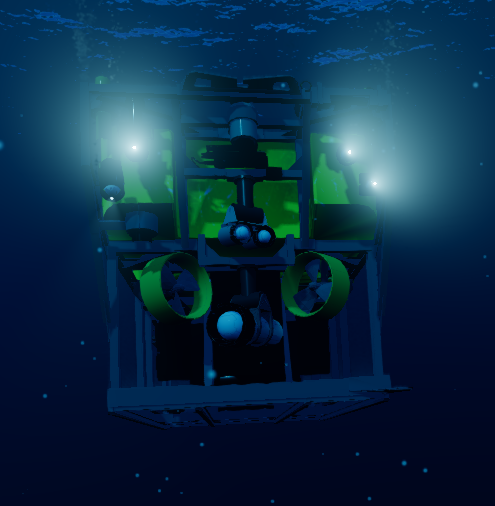
- Defined physical‑visual realistic 3D models of MOLA AUV and ROV Doc Ricketts (modeled in blender). Integrated thrusters actuation, teleoperation, and sensing, based on vehicle’s specifications and MBARI’s research papers.
- Tested state‑of‑the‑art computer vision and robotics algorithms on custom modeled world (Kalman filtering, COLMAP SfM, gsplat, AprilTag, ORB‑SLAM3).
Project Demo Video
Project Overview Presentation
Some of the 3D Models Made for this Project
I found some of the models used in thios project directly on sketchfab, while I modeled in blender other custom objects. The custom 3D Models are available on my sketchfab profile. Here is a preview of some of my low-poly “creations”.
What’s Next
Stay tuned, new simulation projects are under development! e.g. Lightweight manipulator for MOLA, acoustic SLAM with factor graph (gtsam), deep sea animals tracking, autonomous navigation in coral reef restoration garden.